
图1 BIM建模案例(图片来源于网络)
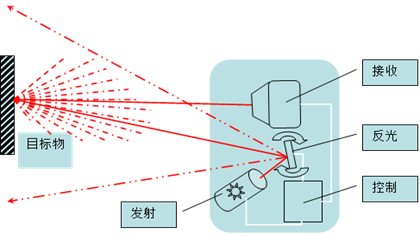
激光雷达以激光器作为发射光源,以光电探测传感器为接收元件,依据激光测距的原理进行距离和角度的测量和记录,以此确定被测对象的方位信息。光脉冲打在物体上并反射回到接收器的传播时间,光速是已知的,传播时间即可被转换为对距离的测量。
S=1/2×c×Δt (1)
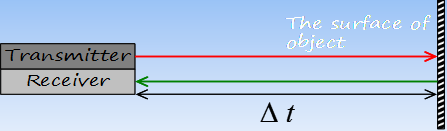
图2 激光测距原理
按照搭载平台分类,激光雷达可分为机载激光雷达、车载激光雷达、背负式激光雷达和地基激光雷达等几种。北京数字绿土科技有限公司自主研发了LiAir无人机激光雷达扫描系统、LiBackpack背负式激光雷达扫描系统、LiEagle直升机激光雷达系统、LiMobile车载激光雷达系统等多个系统平台,可实现高效、快捷的激光点云数据采集。


对于地面相对低矮建筑物外形及室内场景,可采用背包式激光雷达进行扫描;对于高程大、面积广的被测物,可采用机载激光雷达扫描。此外,为更好获取对象三维立体信息,可采用空地一体化数据采集及融合方案。

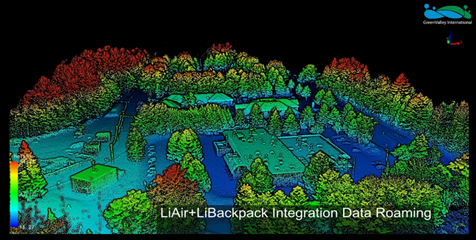
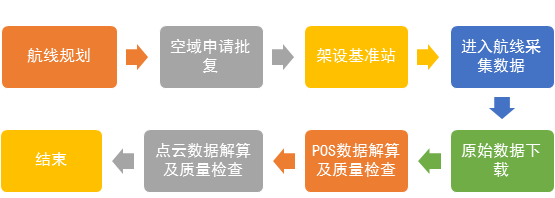
图5 机载激光雷达数据采集流程
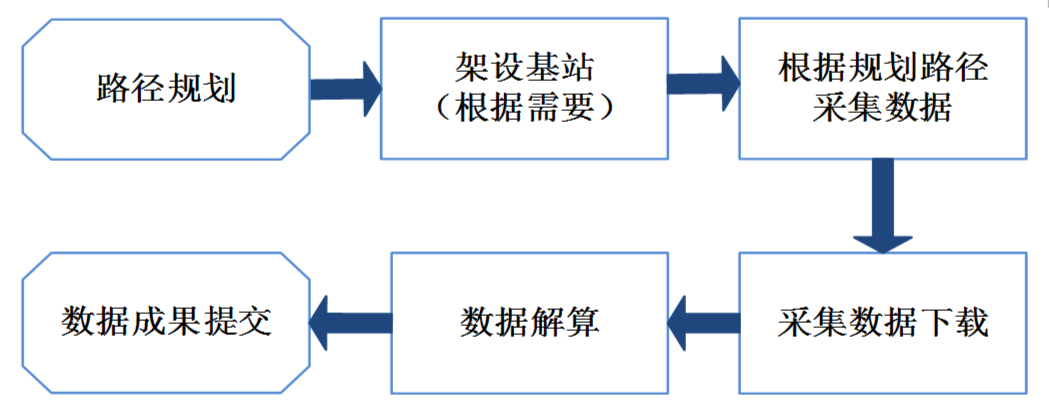
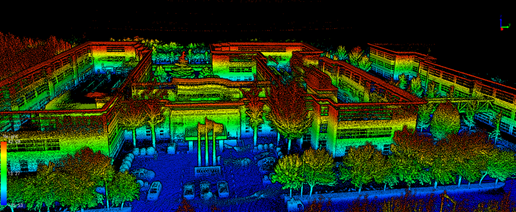
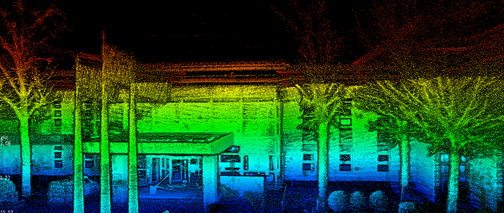
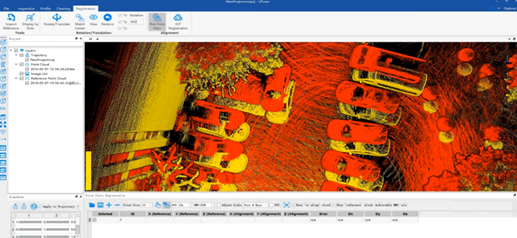
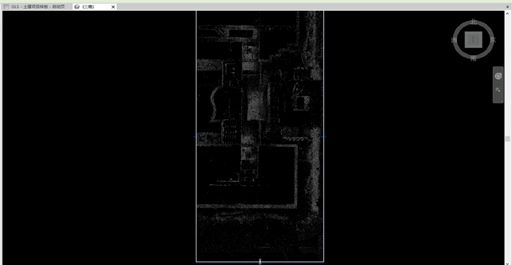
图7 数据采集效果
通过三维激光扫描仪获取物体表面的点云数据,点云数据中包含了采集对象表面的三维坐标信息,同时通过相机可采集对象的纹理、颜色信息,为构建高精度BIM模型提供数据基础。
03 基于激光点云的BIM模型构建
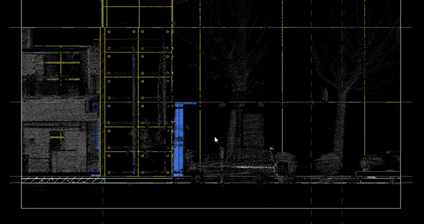
Ø 将矢量图导入建模软件中进行BIM建模
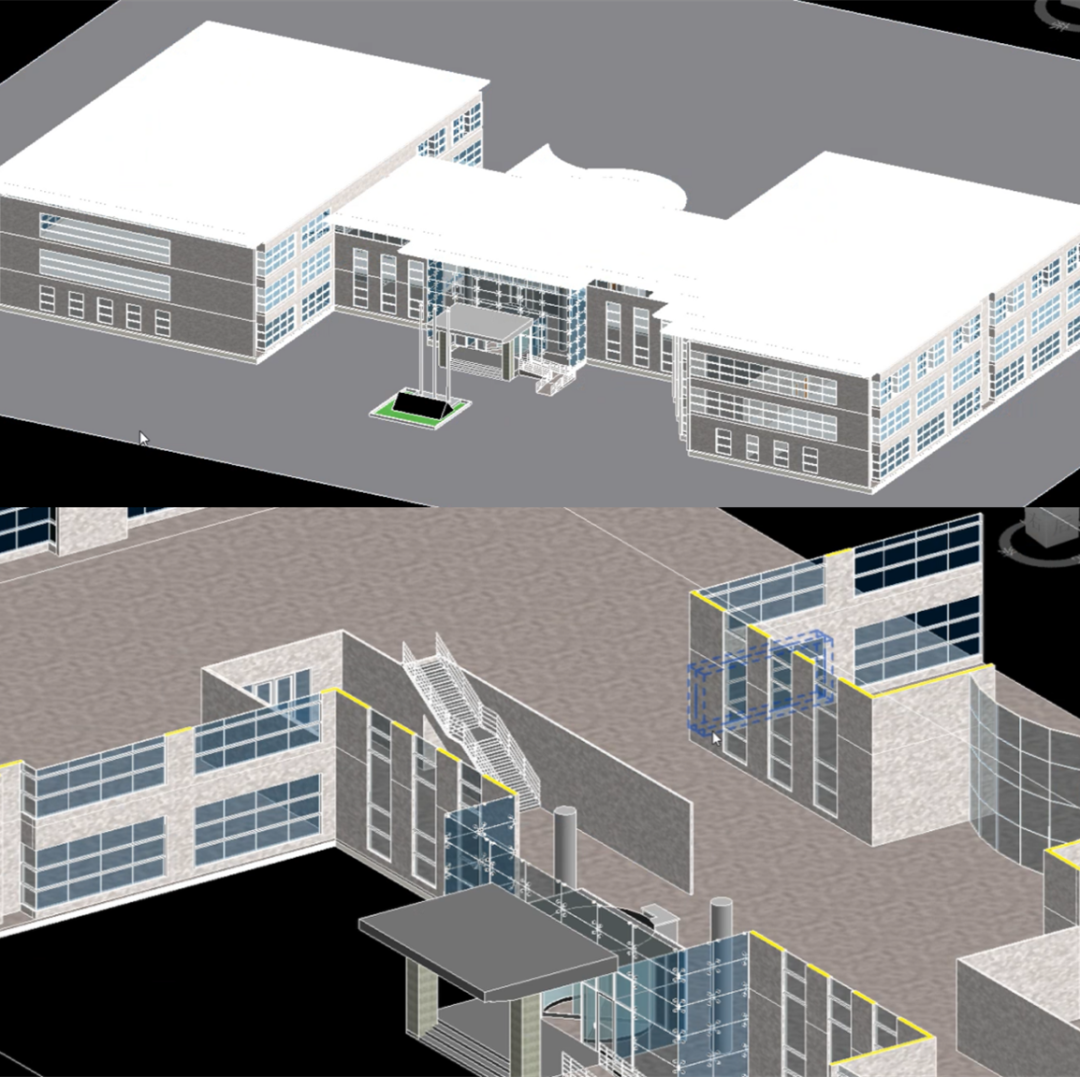
图12 三维建模
04 应用效果
BIM技术可视性、仿真性、优化性、协同性等特点,基于高精度激光点云数据精确搭建对象外部及内部BIM模型,可为建筑工程改造设计和施工信息管理提供依据。
免责声明:尊重合法版权,反对侵权盗版,本网所转载文章目的在于为用户传递更多信息,每篇文章均明确注明作者和来源,若本网有部分文字、图片等侵害了您的权益,在此深表歉意,请您立即联系我们指出问题,我们会尽快核实并解决,谢谢您的配合。
在本次演示项目中,Microdrones(中文名:镁科众思)将展示其2020年最新推出的mdLiDAR3000LR方案,并重点介绍一个在实际工作中非常有用的软件功能:FORMAP快速成图。
Microdrones 使用了 mdLIDAR3000LR 无人机集成系统,在演示区域飞行1个架次,共扫描0.772平方公里,飞行高度300米,采集了GNSS数据,机载激光雷达原始数据,惯导数据。经过处理得到了该区域的数字三维点云,点云密度为每平方米58个点。
摄影测量被认为是一种具有成本效益的解决方案,但 RIEGL LiDAR 软件具有更高的数据捕获与数据处理效率,可以为客户节省时间和金钱。LiDAR 传感器是主动工作模式,不需要环境光来捕获数据点;它们还能够穿透植被。摄影测量则无法做到这些。
北京数字绿土科技有限公司致力于解决激光雷达诸多的技术难题和应用缺陷,经过研发团队的不懈努力,通过一体化的结构设计巧妙的将机载激光雷达、工业全景相机、车载计算机等结合成为可拆卸的车载移动测量系统,在需要机载作业时,可单独使用机载雷达作业;在需要车载作业时,可结合多平台套件实现完整的移动测量数据采集。
近年来,在四川芦山、九寨沟,云南鲁甸抗震救灾行动中,陕西山阳滑坡、四川茂县山体垮塌等地质灾害抢险救灾中,天津滨海新区危险品仓库爆炸、深圳恒泰裕滑坡事故等突发事件应急抢险中,国家测绘地理信息局利用地理信息数据制作灾区各类专题地图,第一时间获取准确的灾后影像地图,研发应急指挥地理信息系统等,为科学决策、抢险救灾、灾情评估及灾后重建等提供有力支持,应急测绘保障也因此被称作“灾区上空的眼睛”。
大疆/2025-01-20
大疆/2025-01-20
大疆/2025-01-14
大疆创新/2025-01-10
QYSEA鳍源科技/2020-10-28

Insta360影石ONE X2口袋全景防抖相机

飞拍科技发布最新6K Pro和4K Pro系列无人机 45分钟续航 10公里图传

大疆发布DJI Pocket 2 灵眸口袋云台相机




